





















すべての製品
軽量爆発兵器廃棄 EOD ロボット ハンド-I








| 起源の場所 | 中国 |
|---|---|
| ブランド名 | Particle |
| モデル番号 | REOD400 |
| 価格 | $102,881 |
| 支払条件 | T/T |

試供品およびクーポンのための私に連絡しなさい。
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
スカイプ: sales10@aixton.com
心配があれば、私達は24時間のオンライン・ヘルプを提供する。
x商品の詳細
| サイズ | ≤830mm×600mm×460mm (完全に詰め込んでいる) | 体重 | ≤37kg ((電池が2セット入っています) |
|---|---|---|---|
| 障害 を 克服 する 能力 | ≥300mm | 溝の幅を横切る | ≥400MM |
| グレード可能性 | ≥45° | 階段 を 登る | ≥45° |
| 移動可能 関節 | 8 | 最長取っ取り距離 | ≥1650mm |
| 取っ手の最大開口幅 | ≥160mm | 上昇容量 | 6〜16kg |
| 操作方法 | ボタンロックとタッチスクリーンの二重モード操作 | 制御方法 | ケーブル制御≥100m (標準ケーブル) ワイヤレス制御≥1000m (屋外) |
| バッテリーの寿命 (通常の温度) | ≥2H | IPグレード | IP66 |
| ハイライト | ハンド・アイ・エード・ロボット,爆発物 兵器 廃棄物 ロボット,軽量ロボットエード |
||
製品の説明
軽量爆発弾品の廃棄EODロボットハウンド-I
記述 と 特徴
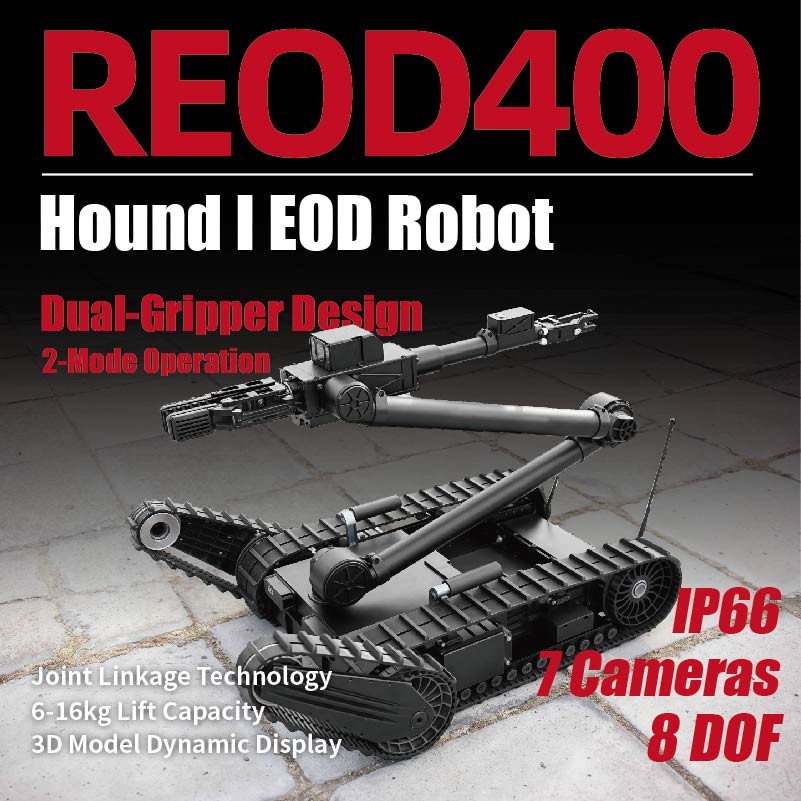
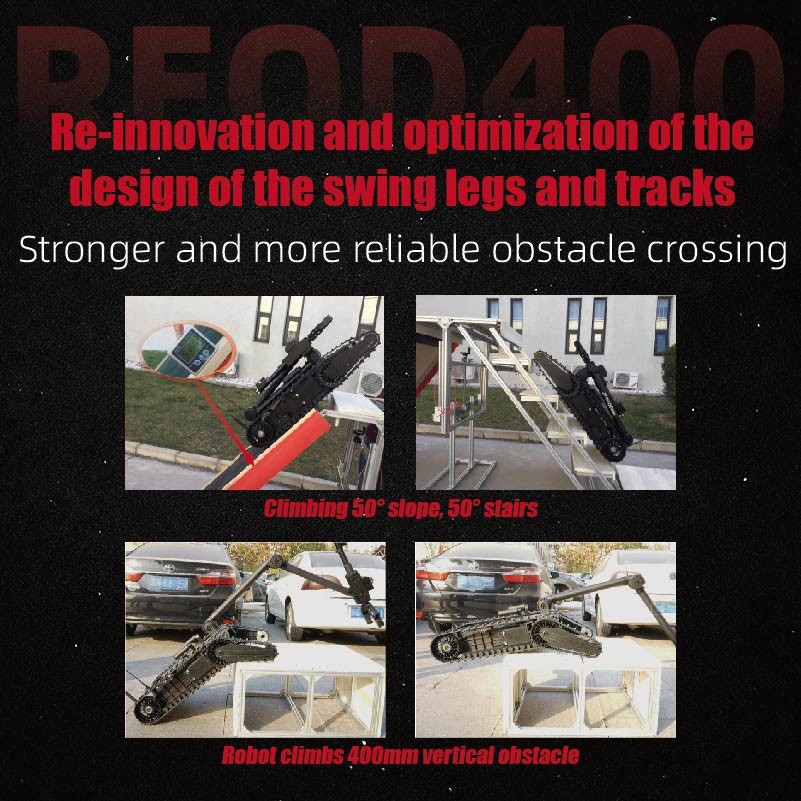
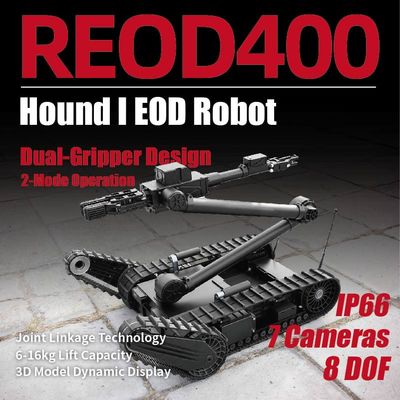
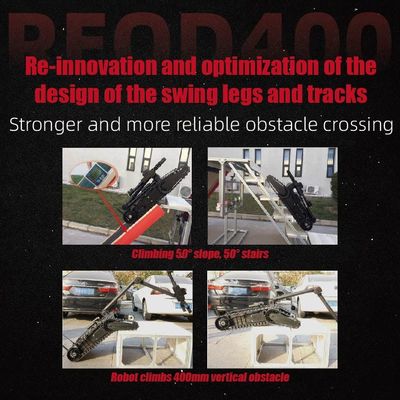
REOD400 EOD ロボットは,高リスク環境における爆発物廃棄 (EOD) の先進的なソリューションです. ユニークな"2つのグリッパー"設計により,同時にさまざまなタスクを実行できます.都市における反テロなどの作戦に 非常に効率的になりますロボットはコンパクトで軽量で,寸法 ≤830mm × 600mm × 460mm (完全に詰め込み) で,重量は ≤37kgです.最大速度は ≥1.8m/s 5ギアと連続変速駆動,障害物からの距離 ≥300mm,梯子の上り方および上り方 45°まで様々な地形での優れた操縦能力と適応性を確保する.
8度の自由度で装備されているマニプレーターREOD400は,最大握り高度≥1700mm (メイン爪) と最大握り距離≥1380mm (メイン爪) で精密な制御を提供します. ロボットは7チャネルビデオディスプレイをサポートします.より豊かな観察の観点が可能になる標準温度でバッテリー寿命 ≥2時間,防塵・防水性 IP66100mまでのケーブル制御と 1000mまでのワイヤレス制御を含む制御方法REOD400は,困難な条件下で信頼性と多用途性のために構築されています. さらに,特定の運用ニーズを満たすためにOEMおよびODMカスタマイズオプションを提供しています.
作業の実行における柔軟性と可行性を向上させる
革新的な"ダブルグリッパー"デザインは"主要グリッパー"と"多機能拡張グリッパー"の両方で装備されたロボット腕を備えています.この設計は,ロボットが作業を遂行する柔軟性や実行可能性を大幅に向上させます複数のタスクを1つの作業で完了するための効果的なサポートを提供します."ダブルグリッパー"設計は"単一のグリッパー"を持つ伝統的な爆弾処理ロボットの限界を効果的に解決します"危険な物体を掴む"と"ドアを開ける,切る,固定する,切断する,フックする,その他の補助的な動作"を同時に実行することはできません. 例えば,"ドアを開け 一気に物体を掴む"など. "
"デュアルグリッパー"設計により,グリッパー以外の機能を果たす必要がない"主要なグリッパー爪"が成功し,ロボットのグリッパー能力が大幅に向上します.主要な爪は6〜16kgの重さの疑わしい危険な物体を掴むことができます, 握り幅最大160mm,最大固定力300N. さらに,特定の運用任務に応じて,"グリッパーツールのセット"は,さまざまな種類や形状の危険品を扱うために迅速に交換できます..
触覚/ジョイスティック制御のサポート ユーザーフレンドリーなインタラクションと信頼性の高い操作
グラフィカルタッチ/ジョイスティック制御操作設計は,現在,国際的に主要な爆弾処理ロボット制御ソリューションです.よりユーザーフレンドリーなインタラクションと信頼性の高い操作のためにユーザーによって高度に認識されていますその主な特徴は以下のとおりです.
- グラフィック操作設計:すべての操作はグラフィカルな方法で設計され,ユーザーが複雑なボタン機能と操作プロトコルを記憶する必要性をなくします.このユーザーフレンドリーなインターフェースは操作をシンプルで直感的にします訓練時間を大幅に短縮します.
- タッチ/ジョイスティック制御操作設計:ジョイスティックボタンとタッチスクリーンの両方がロボットのすべての操作を実行するために使用できます.この2つの操作方法によって提供される冗長性は,システムの信頼性を向上させるだけでなく,ジョイスティックボタンとタッチスクリーン制御を組み合わせることで,運用効率も向上させます.
|
|
リモート3Dリアルタイムディスプレイ 近くで,より直感的な操作
ロボットが任務中に 視線外で動作するので ロボットの関節の角度や位置に関するリアルタイム情報は 操作者にとって極めて重要です The REOD400 uses high-speed links and advanced computer technology to not only achieve real-time feedback of the robot's status information but also to employ leading 3D virtual display technology for remote real-time display of the robot's 3D statusロボットが"遠くにいる"ときでも"近くにいる"ように感じ,より直感的な操作が可能になります.
リモート3Dリアルタイムディスプレイの主な特徴は以下のとおりである.
- ロボットの3D状態のリアルタイム表示
- ロボットの3D状態を様々な角度から観察する
- ロボットの3D状態を拡大・縮小
ロボットのハンドヘルドコントローラが ロボットのリモート3D状態を再現し 3Dモデルを拡大,拡大,あらゆる角度から観察することができます
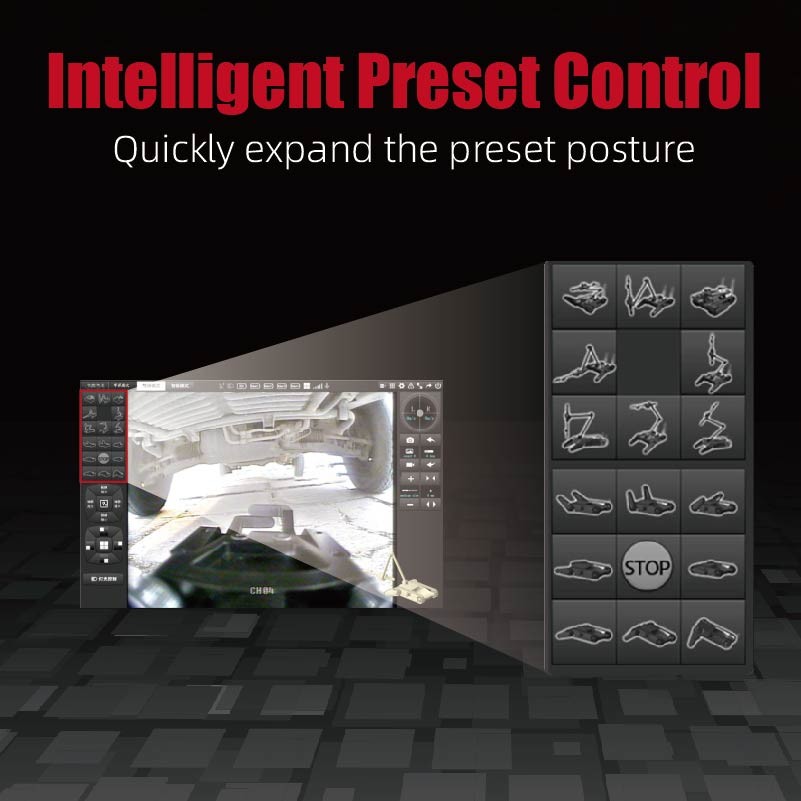
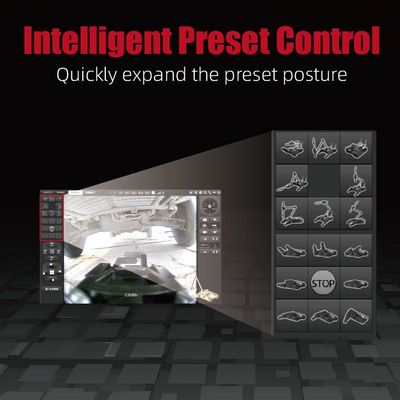
インテリジェント プリセット 姿勢 制御 設計 操作 簡単 迅速
"常用作業のための 予備設定の姿勢制御"により ロボットは ユーザーの必要に応じて "一クリックで 予備設定の位置に 自動的に到達"できますこの機能は,現場での手動操作の量を大幅に削減します爆弾処理の信頼性と安全性を向上させる.
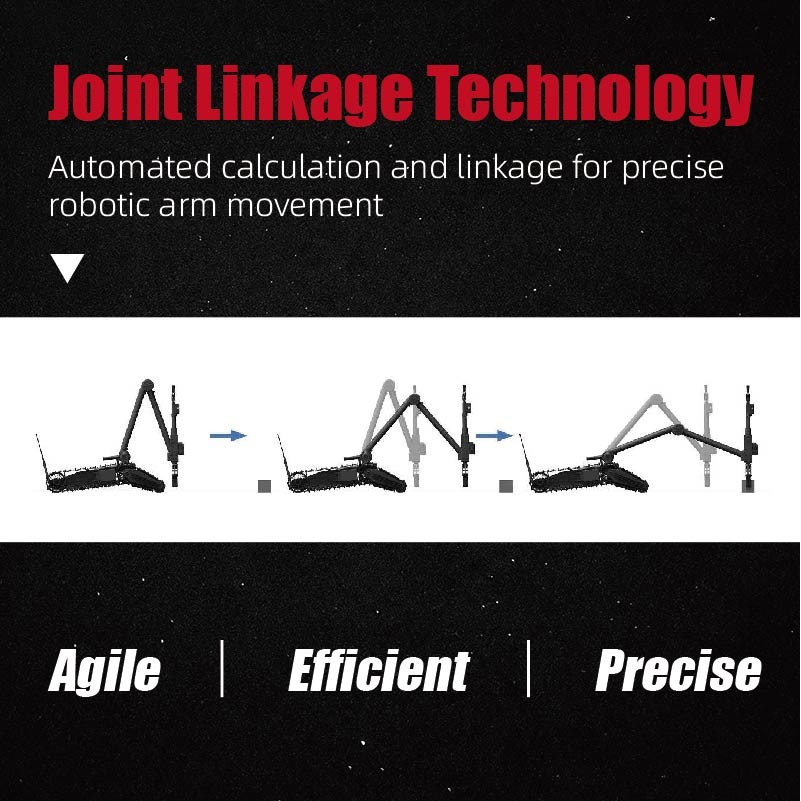
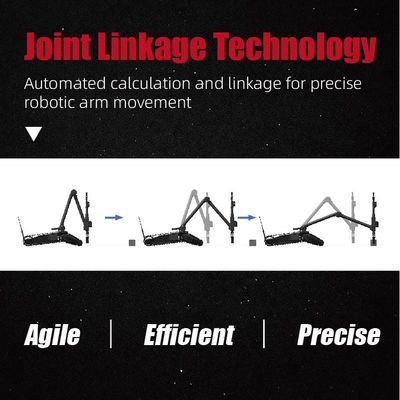
"X-Y-Z"関節結合技術 より正確で効率的な制御
自動計算に基づく"X-Y-Z"関節結合技術操作設計,また"カルテシア系座標に基づくグリッパー変換制御設計"とも呼ばれる.爆弾処理ロボットの"単関節"制御を "多関節調整"制御に変えます爆弾処理ロボットの運用効率と精度を大幅に向上させ",単関節"制御設計と比較して,平均操作時間を80%短縮します.
REOD400は自動計算で"カルテスの座標に基づくグリッパー変換制御"を実現しますそれはすぐにロボットを制御する "多関節調整運動"を達成するために"次元空間グリッパー翻訳これは操作の困難を大幅に軽減し,精度を高め,繰り返し繰り返す必要なくほぼ即時の位置付けを可能にします.
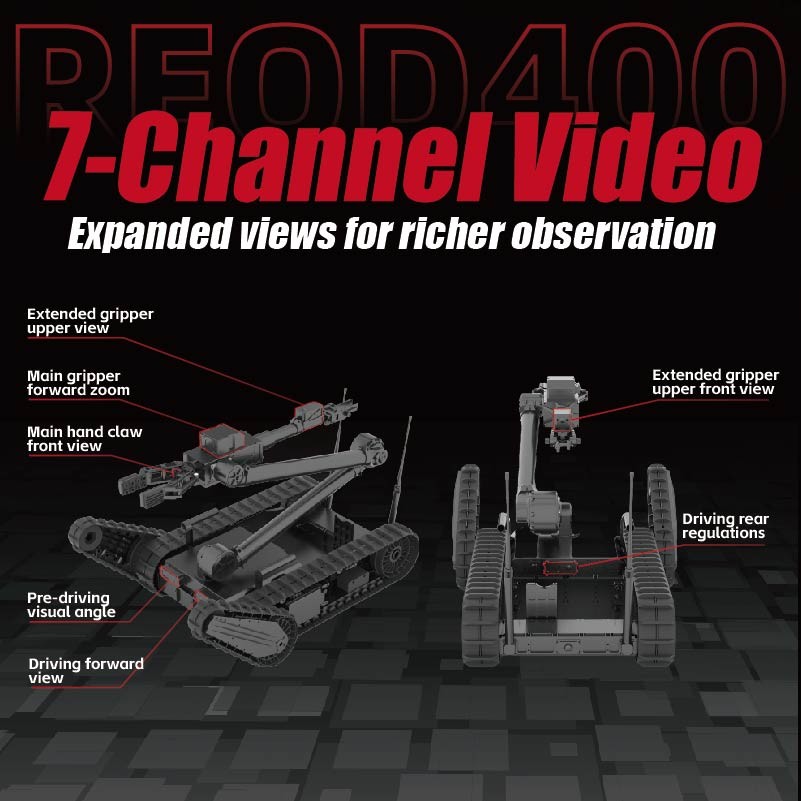
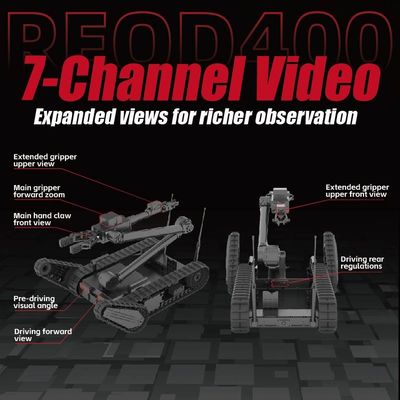
モード 適応型 イメージ システム 改善された観察のための7つのカメラビュー
ロボットのイメージングシステムは,操作者の目として機能します.REOD400は,革新的なモード適応型イメージングシステムの設計と7カメラシステム,遠隔環境を認識するフロントラインオペレーターの能力を大幅に向上させる7 カメラ システムの設計は,単純な配置ではなく,実際の使用中にユーザーが直面する問題に基づいて改善と最適化です.
画像処理システムは,一般的に3つの画像組み合わせに分かれます. 運転モード,主要グリッパーモード,拡張グリッパーモード.運転などの典型的なタスクに基づいて,これらのモードの間を自動的に切り替える遠隔環境の意識を高め,より豊かな観察角度を提供します.
8度自由度統合ロボットアーム設計 より柔軟で安全な制御
REOD400 ロボットアームは 8度自由度統合設計を搭載し 強力な空間到達能力を備えていますこの 設計 に よれ ば,ロボット の 手 は 従来 の 爆弾 消耗 作業 だけ で なく,従来 の 5 度 や 6 度 の 自由 度 の 爆弾 消耗 ロボット が 処理 でき ない 作業 も 行う こと が でき ます高,低,深の穴,またはテーブル上の環境で物体を掴むこと,高,低,深の穴の環境で多角偵察を行うことなどです.
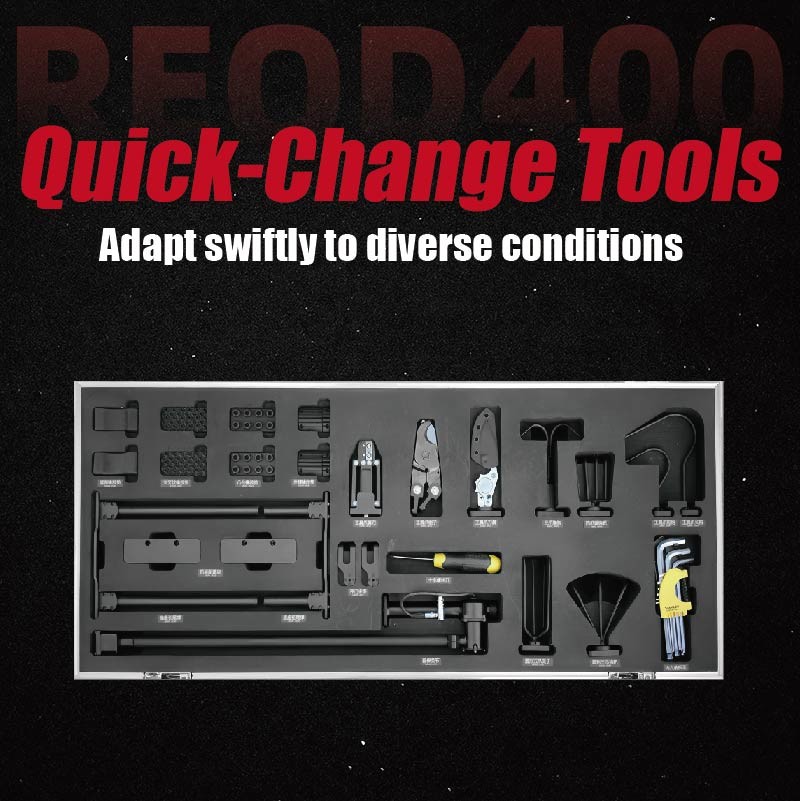
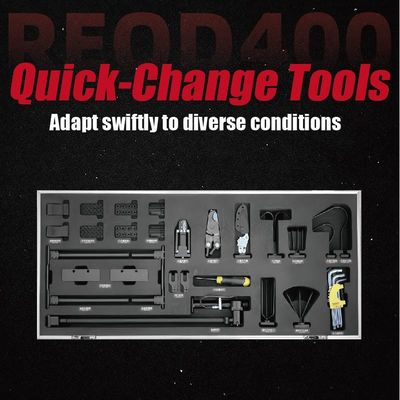
多用性のある速換ツールシステム
REOD400ロボットは 18種類の"速交換ツール"を装備しています 6つの握りツールセット,6つの基本ツールセット,6つの拡張ツールセットを含む"握りツールセット"を,異なる操作任務と様々な危険物体の種類と形に基づいて迅速に交換できるようにする.ユーザの様々な運用ニーズを満たす.
申請
画像ギャラリー
テクニカルパラメータ
|
ロボット・プラットフォーム |
|
|
サイズ |
≤830×600×460mm (完全に詰め込んでいる) |
|
体重 |
≤37kg (電池が2セット入っています) |
|
最大速度 |
≥1.8m/s ((5ギア,連続変速) |
|
障害 を 克服 する 能力 |
≥300mm |
|
溝の幅を横切る |
≥ 400mm |
|
グレード可能性 |
≥45° |
|
階段 を 登る |
≥45° |
|
バッテリーの寿命 (通常の温度) |
≥2時間 |
|
IPグレード |
IP66 |
|
ロボットの腕を握る性能 |
|
|
拡張状態 |
≥6kg |
|
撤回された国 |
≥16kg |
|
爪 |
2 |
|
移動可能 関節 |
8 |
|
最大観測高度 |
≥2400mm |
|
最大握り高さ |
≥1700mm(主爪),≥2000mm(副爪) |
|
最短の捕捉距離 |
≥1380mm(主爪について)≥1650mm(副爪) |
|
取っ手の最大開口幅 |
≥160mm |
|
ポータブルコントローラ |
|
|
サイズ |
≤360×210×70mm |
|
体重 |
≤2kg ((バックパックなし) |
|
スクリーン表示 |
10.1'' LCD |
|
ビデオディスプレイ |
7チャネル |
|
操作方法 |
ボタン・ローカーとタッチスクリーンの二重モード操作 |
|
制御方法 |
ケーブル制御≥100m (標準ケーブル) ワイヤレス制御≥1000m (屋外) |
連絡 ください
エイミーさん